
昊阳铁路检测公司——惯导GPS轨道平顺性检测系统 介绍366
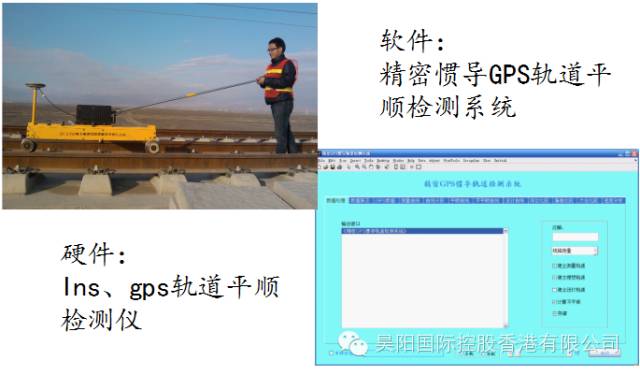
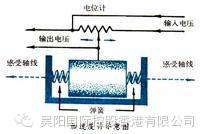
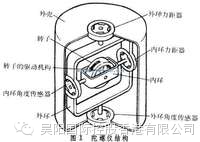
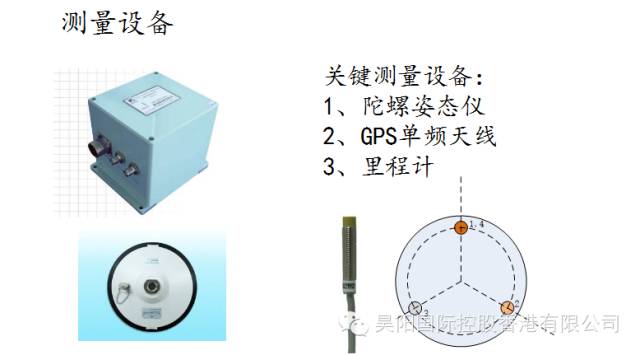
惯导GPS轨道平顺性检测系统 ---基于INS、GPS组合导航技术 概述: 惯导GPS轨道平顺检测系统: 该项目基于INS+GPS组合组合导航技术,并融合电子技术、计算机技术为一体,在硬件平台和软件算法的支持下,实现铁路轨道平顺性高速、高精度检测的集成系统。 原理: 1、惯性导航 inertial navigation 利用陀螺仪和加速度计这两种惯性敏感器,通过测量船舶加速度和角速度而实现的自主式导航方法。 2、惯性导航系统 Inertial Navigation System(ins) 惯性导航系统是一种利用安装在运载体上的陀螺仪和加速度计来测定运载体位置的一个系统。通过陀螺仪和加速度计的测量数据,可以确定运载体在惯性参考坐标系中的运动,同时也能够计算出运载体在惯性参考坐标系中的位置。
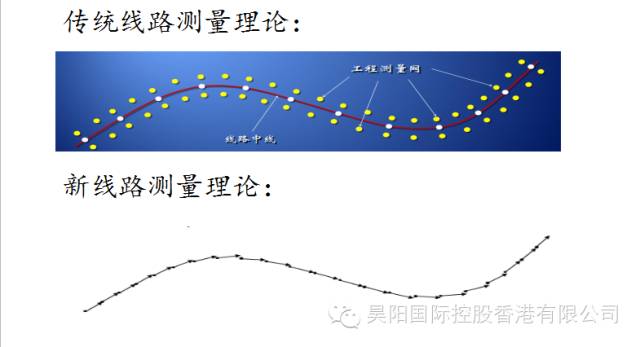
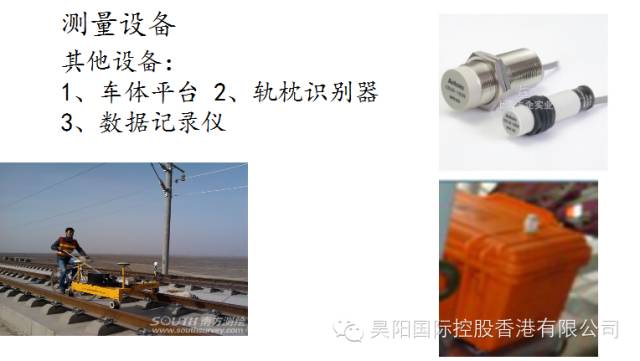
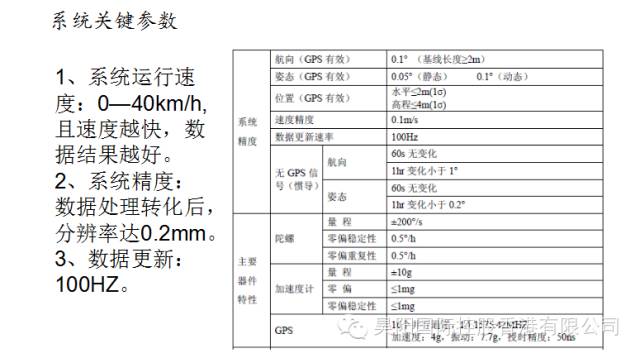
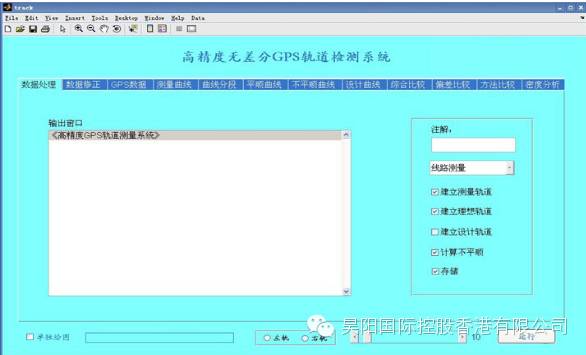
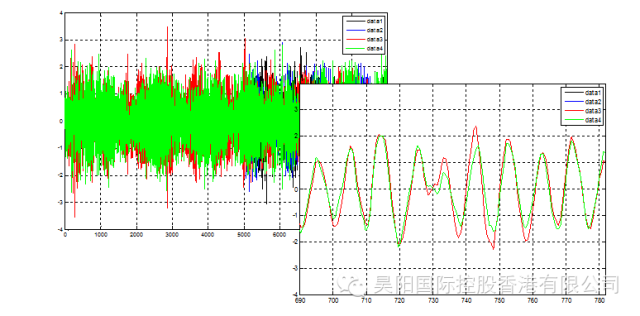
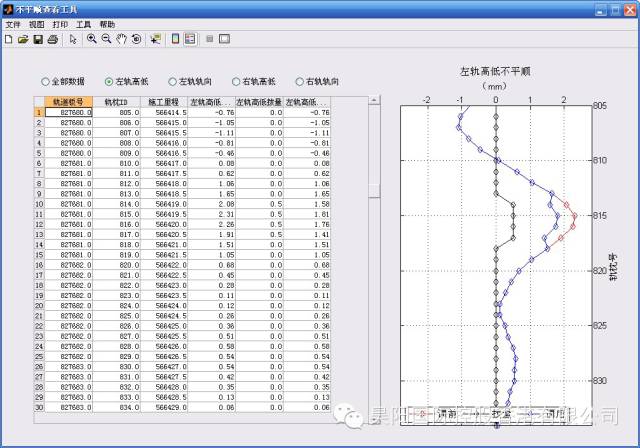
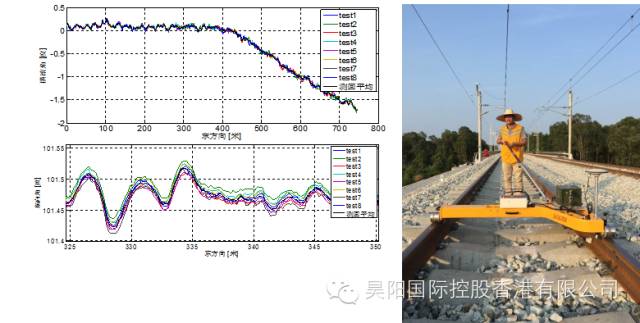
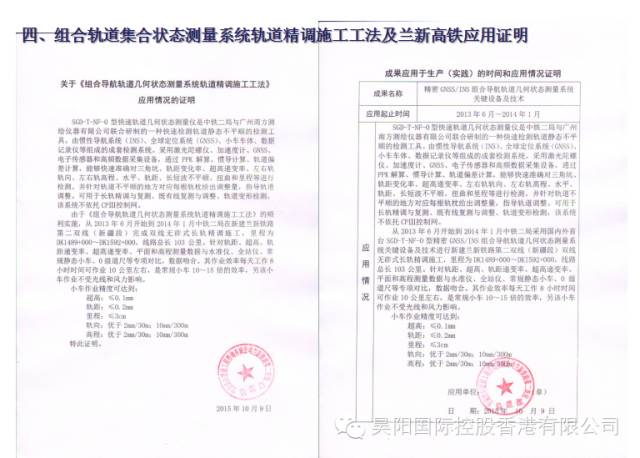
主要优点.(1)由于它是不依赖于任何外部信息.也不向外部辐射能量的自主式系统.故隐蔽性好且不受外界电磁干扰的影响;(2)可全天侯全球、全时间地工作于空中地球表面乃至水下.(3)能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且噪声低.(4)数据更新率高、短期精度和稳定性好. 其缺点是:(1)由于导航信息经过积分而产生,而且存在漂移影响,定位误差随时间而增大,长期精度差;(2)每次使用之前需要较长的初始对准时间;(3)设备的价格较昂贵。 3、北斗导航系统 北斗全球定位系统 功能:导航、测量、授时 双天线定向: 利用双天线同时获取测量数据,解算双天线方向角。 4、组合导航技术 将两种或两种以上导航系统以适当方式组合为一种导航系统,以达到提高系统精度和改善系统可靠性等目的,这种系统被称为组合(或综合)导航系统。至于哪些导航系统可相互结合成为组合导航系统,一般是没有什么限制的。但惯性导航系统由于其工作的完全自主性、以及所提供信息的多样性(位置、速度及姿态),已成为当前各种航行体上应用的一种主要导航设备;并且,在现已得到应用的机载组合导航系统中,绝大部分为惯性(INS)为基的组合系统。 组合导航特点: 利用多种信息源,互相补充,构成—种有多余度和导航准确度更高的多功能系统。 组合导航的实质是以计算机为中心,将各个导航传感器送来的信息加以综合和最优化数学处理,然后对导航参数进行综合显示或输出。新的数据处理方法,特别是卡尔曼滤波方法的应用是实现组合导航的关键。卡尔曼滤波通过运动方程和测量方程,不仅考虑当前所测得的参量值,而且还充分利用过去测得的参量值,以后者为基础推测当前应有的参量值,而以前者为校正量进行修正,从而获得当前参量值的最佳估算。 新线路理论: 新型线路测量理论对线路表达可以抽象理解为假定一个点从起点出发,沿着一定角度方向运动,随之就形成一条轨迹线。线路的描绘精度取决于各种角度等信息记录的频率,即里程、姿态数据记录精度。 系统采用方向里程坐标系,用里程值作为横坐标,方向值作为纵坐标。轨道的线型投影到三个空间立面上,分为轨向曲线、高低曲线和水平曲线。由此可以在同一里程系统将轨道的姿态信息描绘到三个方向里程坐标系统中,即轨向里程坐标系、高低里程坐标系、水平里程坐标系。直接获取三个坐标系的信息即可计算得到轨道的水平、轨向、高低的不平顺信息。 数据采集及处理 系统数据主要采集内容有: (1)姿态记录数据:记录的沿轨向、高低、横滚方向的角加速度和加速度值。 (2)里程测量数据:融合多种里程测量方法,确保获得高精度的里程测量数据。 (3)轨枕探测数据:记录轨枕信息,定位数据改正量对应线路位置,辅助计算里程。 软件界面: 数据处理界面 可视化查看调整量 报表: 牵引方式: 人工牵引:约5km/h 实验概况: 一、在兰新铁路第二双线项目部五标段上得出的,历时3个月,共实测280多公里。一台惯导车相当于15台常规轨检小车,省了大量的人力与工时。 动检车结果: 累计检测: 280公里 优良公里: 280 公里 优良率: 100 % 失格率: 0 % TQI:3.3 二、2013年8月完成中国总装备部华阴武器试验场火箭橇轨道调整项目。
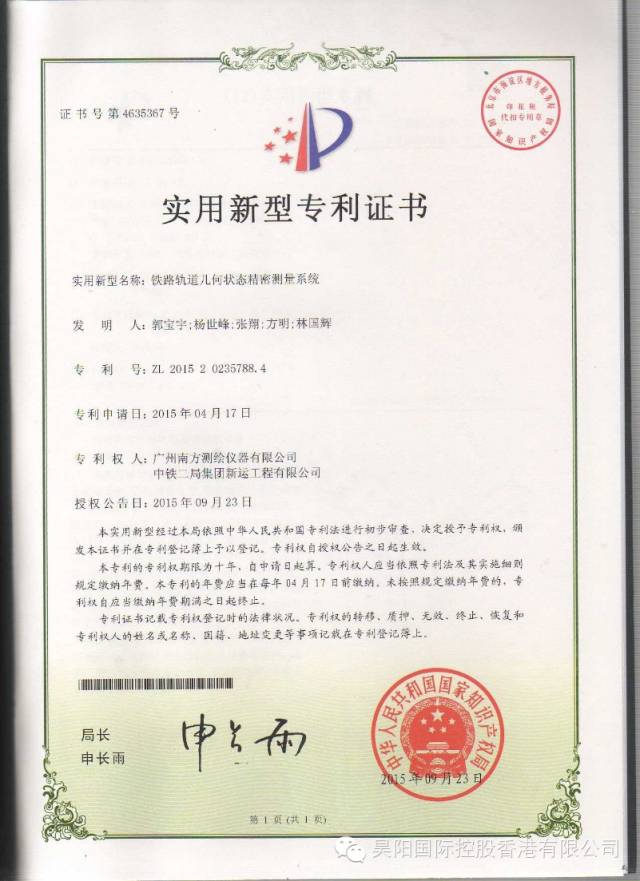
一、获得国家实用新型发明专利 二、中国仪器仪表学会优秀产品奖 三、获得广东重点项目科技项目(奖金500万) 成果和结论 1.世界上唯一一个将组合惯导成功用于高铁的系统。填补了世界在这一领域的空白。 2.该项目在美国获得了世界惯导协会一等奖。 3.该系统在精度保证的情况下是进口检测系统的30倍工作效率,打破进口设备高价低效的壁垒。 4.应用范围,建设期长轨精调、联调联试;运营期轨道平顺性检测、轨道静态变形检测、轨道维护及检修等。 5.摒弃目前世界上其他国家的CPIII测量技术,该系统不再依靠CPIII控制网定位,而是依靠北斗卫星进行定位,数据更加可靠。 |
|





![]()
![]()
![]()
![]()